import numpy as np
from pyrat.geometry import Polytope, Geometry
from pyrat.geometry.operation import cvt2
from pyrat.util.visualization import plot
a = np.array(
[
[-1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0],
[0, -1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0],
[0, 0, -1, 0, 0, 0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, -1, 0, 0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, -1, 0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, -1, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, -1, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0, -1, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 0, -1, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, -1, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, -1, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, -1],
[1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 1, 1, 1, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 1, 1, 1, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1],
[1, 0, 0, 1, 0, 0, 1, 0, 0, 1, 0, 0],
[0, 1, 0, 0, 1, 0, 0, 1, 0, 0, 1, 0],
[0, 0, 1, 0, 0, 1, 0, 0, 1, 0, 0, 1],
]
)
b = np.array([0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 2, 1, 2, 2, 1, 2, 3])
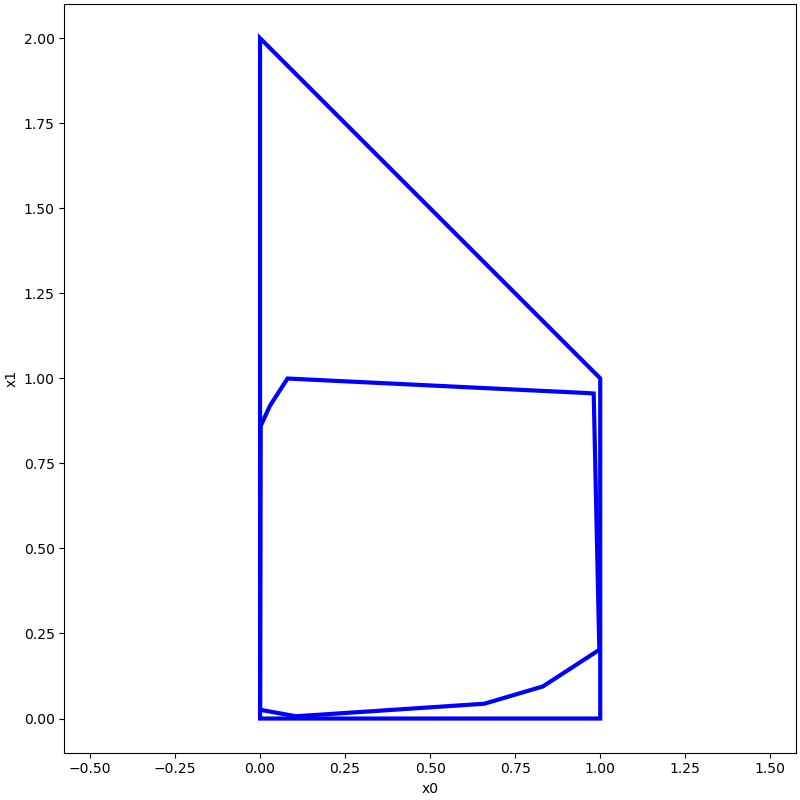
p_from_inequalities = Polytope(a, b)
points=np.random.rand(100,2)
p_from_vertices=cvt2(points,Geometry.TYPE.POLYTOPE)
plot([p_from_inequalities,p_from_vertices], [0, 1])